







熊蓉教授,系國家科技部重點(diǎn)專項(xiàng)智能機(jī)器人專家組專家,RoboCup國際理事會理事,浙江省機(jī)器換人專家組專家,浙江大學(xué)控制學(xué)院機(jī)器人實(shí)驗(yàn)室主任。2017年8月世界機(jī)器人大會上,她被邀請做了題為《智能移動機(jī)器人技術(shù)及應(yīng)用》的主題演講,提出的智能移動機(jī)器人“自然無軌導(dǎo)航”等研究,格外引人關(guān)注。
在長達(dá)數(shù)十分鐘的發(fā)言中,熊蓉教授為我們梳理了我國制造業(yè)機(jī)器人的研發(fā)現(xiàn)狀和重要節(jié)點(diǎn),其中既有她對于國際機(jī)器人產(chǎn)業(yè)發(fā)展的深度理解,亦有對國內(nèi)機(jī)器人產(chǎn)業(yè)發(fā)展前景和重點(diǎn)方向的思考分析,干貨非常多,至今讀來依然獲益匪淺,值得您花時(shí)間閱讀。
尊敬的各位領(lǐng)導(dǎo),各位嘉賓,大家下午好!感謝組委會的邀請,我來自于浙江大學(xué)控制學(xué)院機(jī)器人實(shí)驗(yàn)室,今天主要為大家介紹我們在機(jī)器人方面所做的一些工作,其中將重點(diǎn)介紹智能移動機(jī)器人的有關(guān)技術(shù)。

之前關(guān)于機(jī)器人的背景,各位嘉賓已經(jīng)講得很多了,這里我只做一個(gè)簡要介紹。基于市場驅(qū)動與技術(shù)發(fā)展,目前機(jī)器人產(chǎn)業(yè)已經(jīng)成為各個(gè)國家的戰(zhàn)略型新興產(chǎn)業(yè)。我是從2000年開始從事機(jī)器人研究,當(dāng)時(shí)有讀到2001年《世界周刊》的一篇報(bào)道,文中卡耐基梅隆大學(xué)的教授預(yù)測“機(jī)器人產(chǎn)業(yè)會超越IT資訊產(chǎn)業(yè)”,而那時(shí)還是IT非常熱的時(shí)候。之后很快到了2013年,中國就迎來了機(jī)器人產(chǎn)業(yè)的爆發(fā)。從1956年的第一臺工業(yè)機(jī)器人誕生并應(yīng)用到汽車領(lǐng)域,到現(xiàn)在我們已經(jīng)有了非常多不同類型的機(jī)器人,且已經(jīng)應(yīng)用到了包括工業(yè)、外空探測、軍事、醫(yī)療手術(shù)、康復(fù)等各行各業(yè)里,機(jī)器人已經(jīng)逐漸向社會各個(gè)領(lǐng)域不斷滲透。
但是我們發(fā)現(xiàn),這些機(jī)器人在應(yīng)用過程中無論是形態(tài)上還是智能上,仍有很多局限性,因而現(xiàn)在很多的研究機(jī)構(gòu)與機(jī)器人企業(yè)都在研究各種各樣的輕型機(jī)器人。如工業(yè)中能夠與人交互協(xié)作的機(jī)器人,或?qū)⒃瓉砣塑嚪蛛x的結(jié)合在一起,以及一些仿生機(jī)器人。關(guān)于這些機(jī)器人,除了它們的外部形態(tài)外,還有一個(gè)非常重要的問題,就是內(nèi)部的智能性。智能化是新一代機(jī)器人的核心特征,對于腿足機(jī)器人來說,不管是讓它適應(yīng)不平整的地面,實(shí)現(xiàn)動態(tài)的移動控制;還是在家庭服務(wù)中,不斷實(shí)現(xiàn)對作業(yè)任務(wù)的移動,以及對物體的操作;或是在人機(jī)交互中,對人臉、人體進(jìn)行識別,進(jìn)而識別人的情緒,開展對應(yīng)的自然交互;以及在工業(yè)中的人機(jī)協(xié)同作業(yè)和康復(fù)、助殘中的人機(jī)協(xié)同作業(yè),還有如何讓機(jī)器人自主地學(xué)習(xí)技能,并在泛化的作業(yè)內(nèi)容中實(shí)現(xiàn)……以上這些都是當(dāng)前研究的熱點(diǎn)。但就整體來說,其中最關(guān)鍵的還是如何讓機(jī)器人變得智能。
關(guān)于智能,我們提到兩個(gè)核心問題:一是感知,一是控制。獲得環(huán)境和自身的信息,然后基于感知進(jìn)行伺服的控制,兩者之間相互關(guān)聯(lián),形成一個(gè)閉環(huán)系統(tǒng)。通過這兩個(gè)作業(yè),我們要使得機(jī)器人系統(tǒng)有很好的適應(yīng)性,能夠適應(yīng)各種不同的環(huán)境,適應(yīng)各種不同的操作對象以及各種不同的地形等等。
基于本人的計(jì)算機(jī)背景,我們的實(shí)驗(yàn)室從2000年開始,主要關(guān)注于機(jī)器人的智能化方面。在17年的發(fā)展過程中,我們的發(fā)展方向主要概括為三個(gè):如何進(jìn)行智能的操作、智能的移動和智能的運(yùn)動。下面我先簡要地介紹一下實(shí)驗(yàn)室在智能操作和智能運(yùn)動方面的一些成果,然后再重點(diǎn)介紹一下在智能移動方面所做的各項(xiàng)工作。
首先是智能操作。
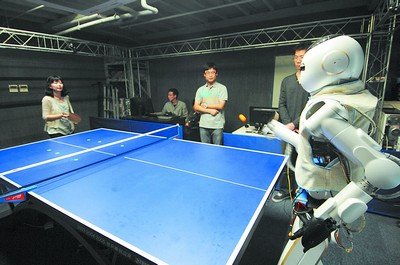
操作是工業(yè)機(jī)器人最基本的功能需求。但是從工業(yè)機(jī)器人進(jìn)入到現(xiàn)在,就需要滿足柔性制造的發(fā)展來看,也對機(jī)器人的智能性提出了需求,即能否通過各種各樣的傳感器來感知其作業(yè)對象并進(jìn)行在線作業(yè);而對于服務(wù)機(jī)器人來說,它更是一個(gè)必備的技術(shù)要求。因而不管是工業(yè)機(jī)器人還是服務(wù)機(jī)器人,人機(jī)協(xié)作是一個(gè)發(fā)展趨勢。這同樣意味著,我們的機(jī)器人需要具有感知的能力,去感知它的交互對象及意圖,然后來規(guī)劃自己的運(yùn)動。于是,在2008年到2011年間,我們在國家863重點(diǎn)課題的支持下,做了一個(gè)乒乓球?qū)Υ驒C(jī)器人,其實(shí)質(zhì)是在解決智能操作的問題。它主要通過對某個(gè)對象的快速識別、定位,來考慮如何安排自己的運(yùn)動,即對機(jī)械臂運(yùn)動軌跡進(jìn)行預(yù)測,然后規(guī)劃出機(jī)器人的全身運(yùn)動,這是在線、實(shí)時(shí)的規(guī)劃,并且要保證這個(gè)手臂在快速作業(yè)時(shí)的動態(tài)平衡控制。該成果于2011 年10月發(fā)布,得到了國內(nèi)外的很大肯定。包括英國的路透社、美國的美聯(lián)社,以及美國國家地理頻道在去年開設(shè)的一個(gè)名為Nothing Impossible的節(jié)目,都來到實(shí)驗(yàn)室做了專題報(bào)道,更有很多的人慕名前來和這款機(jī)器人對打。(看圖)這就是第一位來和它對打的老先生,某雙蛇發(fā)球器的老總,從小打乒乓球。我們當(dāng)時(shí)生產(chǎn)了兩款這樣的機(jī)器人,他們之間可以進(jìn)行對打。但是機(jī)器人間的對打難度不及于他們與人類的對打,這是因?yàn)闄C(jī)器人是比較可控的,不像人類會有忽快、忽慢的速度,甚至所打的球會帶有旋轉(zhuǎn)性。同時(shí),由于我們最初的定義就是制造一款仿人機(jī)器人,所以這款乒乓球?qū)Υ驒C(jī)器人也能走路,只不過它的速度和國際上相比還有較大差距。這款機(jī)器人主要解決的是如何利用它全身的關(guān)節(jié),來保證穩(wěn)定的平衡控制及作業(yè)的精確性。(看圖)這是工博會上,萬鋼部長和它的對打,這些是在863成果20周年匯報(bào)上的一些照片。
這個(gè)作業(yè)完成后,我們將這一技術(shù)應(yīng)用到了工業(yè)領(lǐng)域。在該領(lǐng)域里,涉及到對不同物品的分揀。(看圖)這是我們給某企業(yè)做的幾套自動化單元,當(dāng)中有涉及到耳機(jī)這樣很小且沒有什么紋理的物品,我們要快速地識別它的位置,然后規(guī)劃機(jī)械臂的運(yùn)動實(shí)現(xiàn)抓取,進(jìn)而去適應(yīng)不同的對象、插件等等。(看圖)我們把一個(gè)工作臺臨時(shí)推到機(jī)械臂面前,它能夠在1分鐘內(nèi)完成標(biāo)定,然后開始精確作業(yè)(ICT的焊接對精度要求挺高),這解決了原來在工業(yè)上人機(jī)標(biāo)定作業(yè)和機(jī)械臂標(biāo)定時(shí)需要大量專業(yè)人員和大量時(shí)間的問題。
另外我們還開展了進(jìn)一步研究,即原先我們針對的是有相對少量旋轉(zhuǎn)的球,但其實(shí)在很多現(xiàn)實(shí)領(lǐng)域里,都會涉及到有大量旋轉(zhuǎn)的事物,比如在軍事對抗、航空航天領(lǐng)域里都有這樣對象作業(yè)的需求。那么在帶有高速旋轉(zhuǎn)的情況下,如何預(yù)測它的軌跡,就變得非常重要。因此,在國家自然科學(xué)基金的支持下,我們于2012年開始了這方面的工作。從最初對球(我們還是以球作為一個(gè)對象)上自然標(biāo)志的識別、跟蹤來估計(jì)它的旋轉(zhuǎn)狀態(tài),第一次實(shí)現(xiàn)機(jī)器人對高速旋轉(zhuǎn)球的接打;到后來我們對模型進(jìn)行肌理分析,再結(jié)合視覺學(xué)習(xí),建立準(zhǔn)確的模型,目前大家看到的就是不用看球上的任何標(biāo)示,完全只根據(jù)它的位置,就能做出精確的軌跡預(yù)測來實(shí)現(xiàn)機(jī)器人對球的接打。而眼下,我們正在進(jìn)一步研究的是如何能讓機(jī)器人把球打回到我們需要的地方,目前我們已經(jīng)完成了對球的旋轉(zhuǎn)建模即能夠接住球,下一步是要把球打到需要的位置上。
除此之外,在智能操作方面,我們也在研究如何簡化機(jī)器人編程的專業(yè)需求。現(xiàn)在的機(jī)器人編程,都需要由專業(yè)人員進(jìn)行,可對于很多中小企業(yè)來說,缺乏這方面的人員,同時(shí)很高的作業(yè)柔性,也需要經(jīng)常改變程序來適應(yīng)。ABB、KUKA在這方面也做了很多工作,如開發(fā)便捷試教的程序。而我們所做的是如何讓它完成一些高層任務(wù)的學(xué)習(xí),如裝配一個(gè)手電筒,裝配一個(gè)開關(guān)。我們通過人來進(jìn)行演示,我們?nèi)ビ^察人的動作,包括對物體的操作以及操作后的效果,然后在一分鐘內(nèi)生成機(jī)器人的程序,讓其來實(shí)現(xiàn)。(看視頻)剛才大家看到的就是對手電筒和開關(guān)的裝配,你可以任意地調(diào)整自己的裝配方式。
第二,我們來看看智能運(yùn)動。
剛才我們看到的腿足式運(yùn)動,主要是解決在輪式、履帶式移動時(shí)有些地面無法到達(dá)的問題,國際上也有很多對這方面的研究,包括模擬人的雙足,模擬鹿、馬、豹子等四足,還有如蟑螂的六足。而我們研究的主要是如何能夠跳得高、跳得快且還能降低它的能效,所以從2012年開始,我們從一個(gè)單的彈性驅(qū)動關(guān)節(jié)著手,來考慮對能量的存儲利用、關(guān)節(jié)損耗的降低,進(jìn)而研發(fā)了這個(gè)能夠快速彈跳的單腿機(jī)器人,目前它是國際上跳躍度最高、能耗量最低的一款機(jī)器人。在此基礎(chǔ)上,近兩年我們又研發(fā)了一款雙足跑跳機(jī)器人,其速度達(dá)到了3.6公里/小時(shí),雖然現(xiàn)在它還只是在跑步機(jī)上跑,但計(jì)劃明年上半年就可實(shí)現(xiàn)在操場上的跑跳。去年我們也接到企業(yè)的委托,研發(fā)了一款名為“赤兔”的四足機(jī)器人,它跟BIGDOG非常類似。所不同的是,“赤兔”采用的是電機(jī)驅(qū)動而非液壓驅(qū)動,因而在行走速度上只實(shí)現(xiàn)了6公里/小時(shí),和液壓驅(qū)動相比還有較大差距,但和波士頓動力后來研發(fā)的電機(jī)驅(qū)動相比,速度基本類似。同時(shí),該款機(jī)器人也能夠根據(jù)關(guān)節(jié)的感知、控制來實(shí)現(xiàn)對不平整地面的適應(yīng),甚至還包括了實(shí)現(xiàn)快速跑跳的能力。
下面,著重介紹我們在智能移動方面所作的工作。
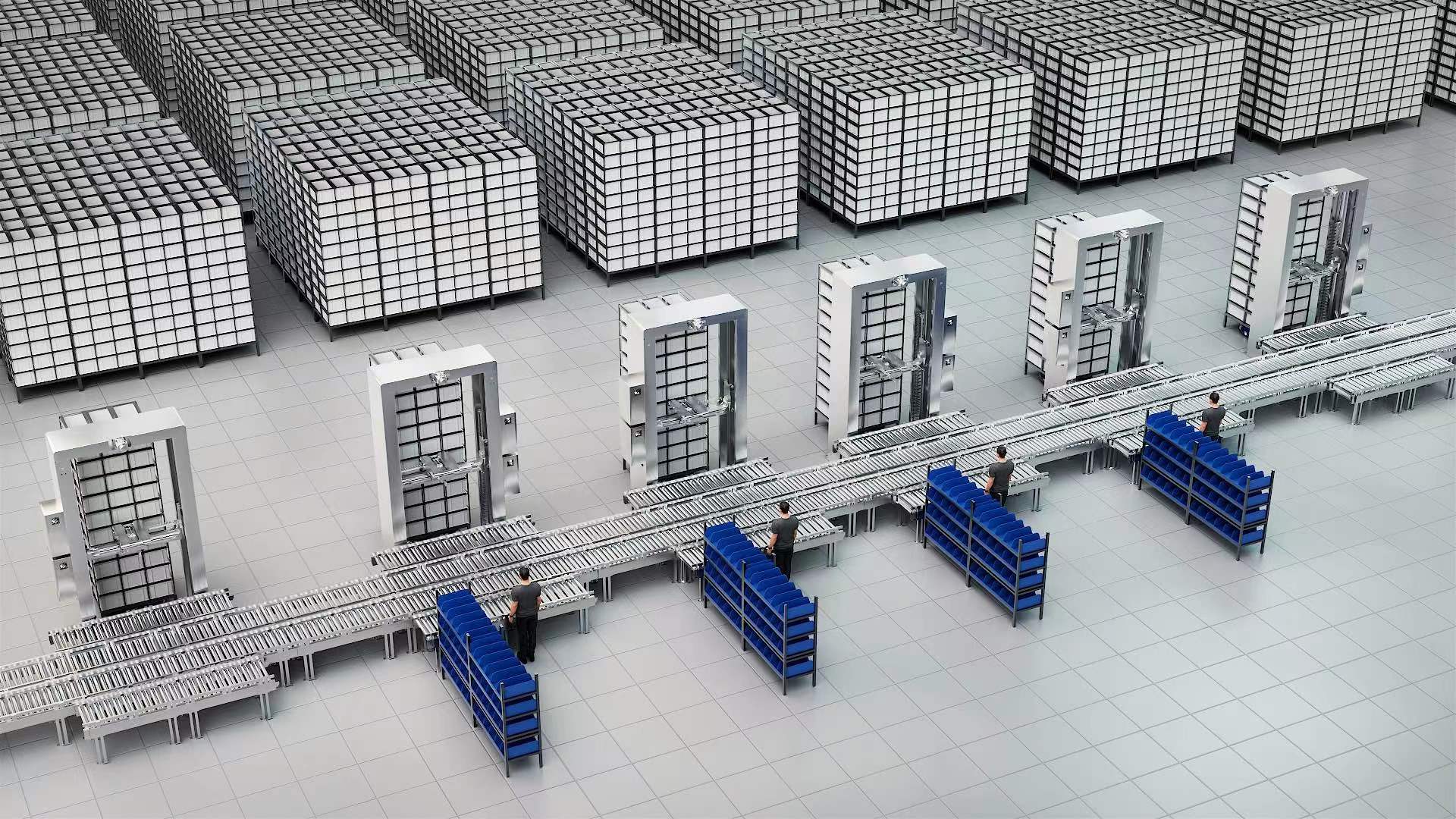
最早提出移動需求的不是工業(yè)界,而是服務(wù)機(jī)器人領(lǐng)域。這是因?yàn)榉?wù)機(jī)器人需要在環(huán)境中的各個(gè)地方作業(yè),它是服務(wù)機(jī)器人必備的能力。而隨著工業(yè)機(jī)器人柔性制造的發(fā)展,也提出了關(guān)于移動車子的需求,(看圖)如左邊是KUKA設(shè)計(jì)的由移動車和機(jī)械臂合作的矩陣型工作單元。同樣的,很多工廠對于物流搬運(yùn)的巨大需求,也對移動機(jī)器人的發(fā)展提出了很大需求。
我們在智能移動領(lǐng)域,主要關(guān)注的是“自然無軌導(dǎo)航”。原來傳統(tǒng)工業(yè)上使用的機(jī)器人還是依賴于在環(huán)境中建立導(dǎo)軌或者標(biāo)志,通過檢測識別來實(shí)現(xiàn)自主移動。但其存在的問題是,如果到了一個(gè)新環(huán)境,必須要依賴人工布置標(biāo)注,而若是身處家庭環(huán)境或室外環(huán)境,我們是很難做到這樣部署的。在工業(yè)上也是如此,企業(yè)的生產(chǎn)線經(jīng)常需要調(diào)整,如我們的某家合作企業(yè),他們的產(chǎn)線每個(gè)月都要進(jìn)行調(diào)整,不能總是把地上的標(biāo)志揭下來重新進(jìn)行布置,因而大家都希望機(jī)器人能夠在沒有環(huán)境標(biāo)識的情況下實(shí)現(xiàn)導(dǎo)航,我們稱之為“自然無軌導(dǎo)航”。它所面臨的挑戰(zhàn)主要有以下四個(gè)方面:
一、對環(huán)境準(zhǔn)確的地圖構(gòu)建。今天,隨著應(yīng)用場景的不斷擴(kuò)散,我們會面臨很多的大環(huán)境,且對機(jī)器人的定位精度要求高,這當(dāng)中就會涉及到有關(guān)大范圍環(huán)境地圖的高精構(gòu)建問題,且還要實(shí)現(xiàn)機(jī)器人在大環(huán)境里,能夠滿足高精要求下的實(shí)時(shí)定位需求;
二、環(huán)境中間總是有各種動態(tài)變化,比如環(huán)境中的很多人車,這是即時(shí)的快速變化;而這輛車早上停在這里、晚上開走了,或者有堆物料原來放在工廠的這個(gè)角落、一個(gè)小時(shí)后運(yùn)走了……這些我們稱之為慢的變化;還有如季節(jié)、氣候等長期的變化;
三、在環(huán)境中有很多物體,特別是對室外導(dǎo)航來說,更需要對這些物體能有敏銳的認(rèn)知;且在很多情況下,我們會面對一些人機(jī)混雜的場景,這都需要我們的機(jī)器人能在這樣的環(huán)境里實(shí)現(xiàn)準(zhǔn)確、快速、安全地移動。
就智能移動而言,有一個(gè)特例叫做無人駕駛,它所面向的對象是固定的,面向的環(huán)境也是明確的。但是拋開無人駕駛,我們的機(jī)器人可能面對的是各種不同的對象,有陸地上通行的、空中飛行的、水下的,以及還有陸地上的各種腿足移動機(jī)器人等等。我們將它在很多運(yùn)行過程中所面向的環(huán)境稱之為Off-the-road,這當(dāng)中可能有很多綠化,沒有GPS信號,沒有人做交通管理……而我們所作的,就是讓機(jī)器人能夠在這些情況下,實(shí)現(xiàn)自己的智能導(dǎo)航。
我們最早從2004年開始,做二維環(huán)境的地圖構(gòu)建和定位導(dǎo)航,這部分技術(shù)大概在2010、2011年時(shí)已經(jīng)成熟,并且運(yùn)用到了兩個(gè)產(chǎn)品中去。(看圖)這是當(dāng)時(shí)我們用二維激光畫出的地圖,機(jī)器人能夠根據(jù)這個(gè)地圖,依賴自身的傳感器進(jìn)行定位,并規(guī)劃自身的路徑適應(yīng)環(huán)境的變化,避開有關(guān)障礙物,實(shí)現(xiàn)快速、安全、平滑的導(dǎo)航。
同時(shí),近幾年我們重點(diǎn)關(guān)注于室外機(jī)器人的地圖構(gòu)建和定位導(dǎo)航。最早進(jìn)行這方面研究時(shí),還沒有像Velodyne的高速旋轉(zhuǎn)傳感器,且對我們來說,它當(dāng)時(shí)出的64線太昂貴了。于是我們就自己搭,用幾個(gè)SICK激光傳感器搭建了一個(gè)云臺,再加上一個(gè)全景相機(jī),把激光的信號和相機(jī)的信號融合起來,就構(gòu)建出一個(gè)全真的環(huán)境。但在操作過程中,我們也發(fā)現(xiàn)了一個(gè)問題,即當(dāng)機(jī)器人的移動速度比激光旋轉(zhuǎn)速度稍快時(shí),直接將它們的數(shù)據(jù)合成,就會產(chǎn)生變形。且如果車輛行駛的很快,和Velodyne的速度相近,也會存在這樣的問題。那么如何去矯正數(shù)據(jù)的變形,確保后面定位的準(zhǔn)確性,就成了我們需要解決的問題。而現(xiàn)在,這個(gè)問題已經(jīng)解決了,我們能將原來模糊的激光合成數(shù)據(jù)形成一個(gè)清晰數(shù)據(jù),其中包含了數(shù)據(jù)模型怎么表示,以及它的這種不確定性和如何進(jìn)行匹配合成等。和國際上最新的NDT相比,我們的產(chǎn)品在收斂率和收斂時(shí)間上都表現(xiàn)不錯(cuò)。(看圖)這是原本在室內(nèi)很模糊、不清晰的地圖,看不清楚圖中的那個(gè)問號是什么,經(jīng)過矯正后我們就能很清晰地看到它原來是個(gè)帶問號的凳子。此處,我們談的是大范圍的環(huán)境地圖以及所涉及的高精構(gòu)建,其數(shù)據(jù)量很大,因而后期如何控制地圖的復(fù)雜度,是否將原來的每一幀數(shù)據(jù)都放入進(jìn)去,也就成為了一個(gè)問題。假如我們在某個(gè)小區(qū)域內(nèi)不停走動,同樣也會得到一個(gè)非常龐大的數(shù)據(jù)規(guī)模。而按照現(xiàn)在的方式構(gòu)建地圖,其數(shù)據(jù)規(guī)模和路徑長度將呈現(xiàn)出非線性的關(guān)系,那我們能否將其與我們的檢測范圍形成某種關(guān)系?要知道隨著檢測范圍的增長,數(shù)據(jù)量也在增長。但是在一個(gè)重復(fù)的地方,有些數(shù)據(jù)是無需采集,只有到了某些新地方,產(chǎn)生了新數(shù)據(jù),才有必要加入進(jìn)來。在這一方面,我們提出用信息熵的評估量化方式來操作。與其他方法不同的是,我們并不是在最后一幀才去考慮是否加入,而是在對所有數(shù)據(jù)進(jìn)行評估后,保留其中信息量較大的數(shù)據(jù),去除掉那些信息量最小的數(shù)據(jù),包括減少它的節(jié)點(diǎn)和邊,從而確保了定位的實(shí)時(shí)性。
我們在智能移動領(lǐng)域所做第三塊工作,主要是研究如果用視覺來進(jìn)行室外環(huán)境長期運(yùn)行的話,那么如何來適應(yīng)周邊環(huán)境的變化?因?yàn)閷τ谝曈X傳感器來說,它的優(yōu)點(diǎn)是成本低,國外有提出一個(gè)非常有名的算法——ORBSLAM,很多企業(yè)都在用,包括我的學(xué)生也在用。但我們在使用中就會發(fā)現(xiàn),當(dāng)它的重復(fù)性比較少,也就是它沒有進(jìn)行閉環(huán)檢測時(shí),偏差還是比較大;第二,當(dāng)環(huán)境發(fā)生變化時(shí),定位的效果也會變得很差;第三,它的計(jì)算復(fù)雜度也較大。所以對于我們來說,就要解決如何在大環(huán)境和周邊環(huán)境的變化中降低計(jì)算復(fù)雜度的問題。對此,我們認(rèn)為主要在于它采用的是全局地圖,即是全局最優(yōu)。其實(shí)對于定位而言,是沒必要做到全局最優(yōu),所以我們提出了全局建拓?fù)洹⒕植拷ㄏ鄬缀蔚囊曈X地圖方式,在進(jìn)行定位時(shí),我們?nèi)ト诤系貓D、融合底層、融合特征匹配并維持它們之間的相對平衡。對于可能是因?yàn)榄h(huán)境變化造成的定位效果差的問題,就要考慮如何把這個(gè)變化的數(shù)據(jù)加入進(jìn)去,且怎樣通過這些不斷增加的變化數(shù)據(jù)來適應(yīng)周邊環(huán)境的變化。(當(dāng)然這里的怎么加就要用到我們之前所說的方法。)為此,我們在浙大玉泉校區(qū)做了三天21次的測試,最終跟orbslam 相比,我們的定位精度大大提高,從原來的均方差3.762米降到了0.5米以內(nèi);第二,計(jì)算的復(fù)雜度降低了,實(shí)現(xiàn)了一個(gè)常數(shù)復(fù)雜度的定位;(看圖)第三,我們從右邊這張圖可以看到,在有記憶的模式下我們能大大提高其定位的準(zhǔn)確率,但對于一些特別復(fù)雜的效果來說,現(xiàn)在還不能完全解決。(看圖)如這張圖的定位失敗率還是很高,差不多達(dá)到0.5,這主要是因?yàn)槠浯竺娣e是路,且路上的環(huán)境不斷變化,車子也在不斷移動,因而關(guān)于這方面的學(xué)習(xí)效果還需要進(jìn)一步提高。
第四塊工作就是對可通行路面的檢測,我們要解決的是如何通過在線的學(xué)習(xí)來適應(yīng)光照、場景的變化。另一點(diǎn)就是如何讓機(jī)器人把每一次的運(yùn)行都當(dāng)成一次經(jīng)驗(yàn),通過累積學(xué)習(xí)的方法來作為對可行路徑的檢測。對于機(jī)器人來說,一次成功就是一次經(jīng)驗(yàn),這樣我們就可以對它進(jìn)行自動標(biāo)注,哪段是可行路徑,哪個(gè)是障礙物,或者哪些是未知的,然后對每一次的運(yùn)行進(jìn)行校準(zhǔn),再把這些經(jīng)驗(yàn)累積起來,通過深度學(xué)習(xí)進(jìn)行訓(xùn)練。然后,當(dāng)我們把它應(yīng)用到其它未知的環(huán)境里時(shí),就會發(fā)現(xiàn)效果大大增強(qiáng)了。(看圖)如我們原來是一直走這條路,學(xué)習(xí)了13次,而當(dāng)我們把它放到另外的環(huán)境時(shí),同樣也能獲得很好的可行路徑檢測效果。我們也將這種方式與之前的方法進(jìn)行了對比,發(fā)現(xiàn)它在弱檢率和漏檢率方面都大大降低了,就像我們?nèi)祟愒趯W(xué)習(xí),不停的有經(jīng)驗(yàn)加進(jìn)來,也會不斷地提高學(xué)習(xí)的正確性。此外,還有一些工作,就是我們在做的物體監(jiān)測、跟蹤,確保機(jī)器人的實(shí)時(shí)、安全導(dǎo)航。這里必須要提的一點(diǎn),就是在相機(jī)抖動時(shí),如何實(shí)現(xiàn)對目標(biāo)的穩(wěn)定跟蹤?現(xiàn)在使用的一些方法都假設(shè)運(yùn)動是連續(xù)的,可對于一些事物比如腿足式機(jī)器人來說,抖動問題就特別明顯,它在走動時(shí)會不停地晃動,就會導(dǎo)致跟蹤的失敗。對此,我們運(yùn)用了離子濾波融合雙運(yùn)動模型和雙觀測模型來進(jìn)行操作,且這些技術(shù)已經(jīng)和一些企業(yè)進(jìn)行了合作推廣。(看圖)如這就是運(yùn)用我們在二維環(huán)境地圖構(gòu)建方面的技術(shù)所生產(chǎn)的變電站巡檢機(jī)器人,目前已經(jīng)在國網(wǎng)、南網(wǎng)里應(yīng)用了300多臺(套)。第二款是工廠里的搬運(yùn)機(jī)器人,和傳統(tǒng)的AGV不同,它不需要在地面上布設(shè)有關(guān)標(biāo)識、二維碼或者激光的導(dǎo)引標(biāo)志,而是完全由機(jī)器人預(yù)先構(gòu)建地圖,然后找到作業(yè)的位置進(jìn)行作業(yè),它能很好地適應(yīng)周邊環(huán)境的變化(這一點(diǎn)在華為的應(yīng)用上特別明顯,因?yàn)槠鋫}庫兩邊堆放的物料經(jīng)常是大批量進(jìn)出,所以需要機(jī)器人能有很好的適應(yīng)性)。
 迦智室外自主無人送貨車LUNA
迦智室外自主無人送貨車LUNA
(看圖)這是我們給京東做的室外無人送貨車,是我的幾個(gè)學(xué)生自主創(chuàng)業(yè)成立的杭州迦智科技有限公司所做,他們主要是做室內(nèi)外的物流機(jī)器人。這里面也運(yùn)用到了我們前面所說的一部分技術(shù),即適應(yīng)大范圍的環(huán)境,并適應(yīng)環(huán)境中各種動態(tài)變化。我們還把它應(yīng)用到了四旋翼飛行器和四足機(jī)器人的系統(tǒng)里去,讓它能完成一些智能作業(yè),這是在2015、2016年參加空中機(jī)器人比賽時(shí)的場景,當(dāng)時(shí)也得到了2016年的亞太賽區(qū)冠軍,并且獲得了組委會的高度表揚(yáng)——“Zhejiang University has currently set the performance level for all IARC teams”。
綜上,我們的工作主要就是把人工智能的技術(shù)和機(jī)器人技術(shù)結(jié)合起來,去實(shí)現(xiàn)智能移動、智能操作和智能運(yùn)動。目前從移動這方面的技術(shù)來看,它的成熟度較好,所以正在由實(shí)驗(yàn)室的技術(shù)研究向產(chǎn)品化發(fā)展;但是就適應(yīng)性方面來說,依然還存在很多問題,還需要進(jìn)一步從技術(shù)和產(chǎn)品兩個(gè)方面去研究,從而確保它在現(xiàn)實(shí)運(yùn)用中的可靠性和穩(wěn)定性。


